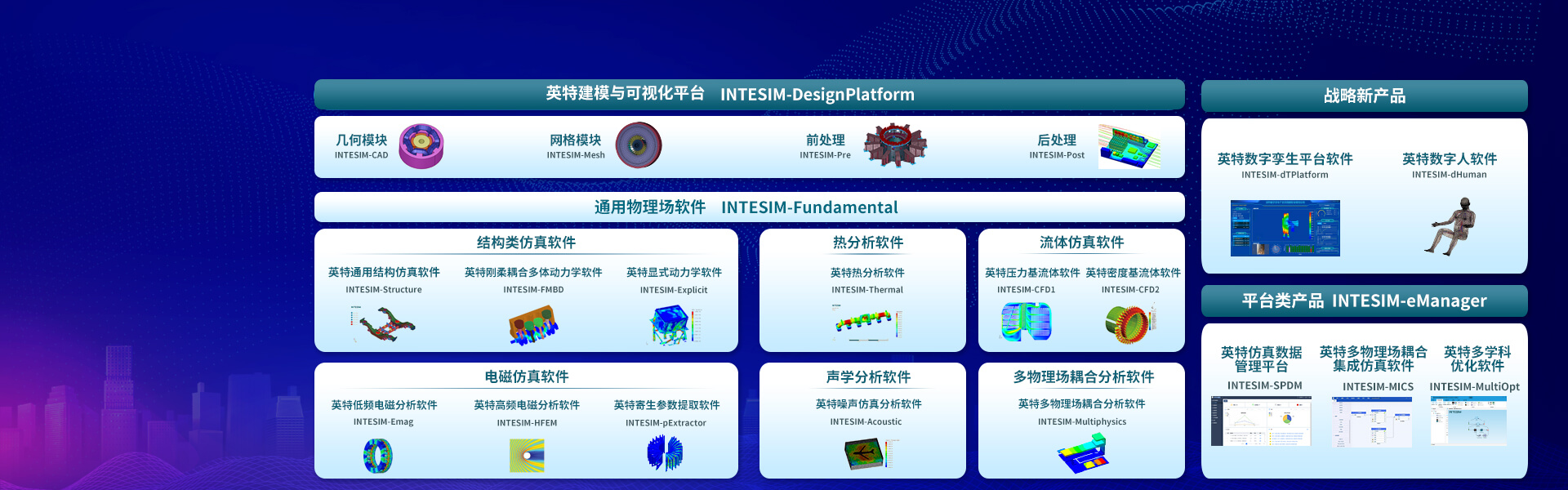
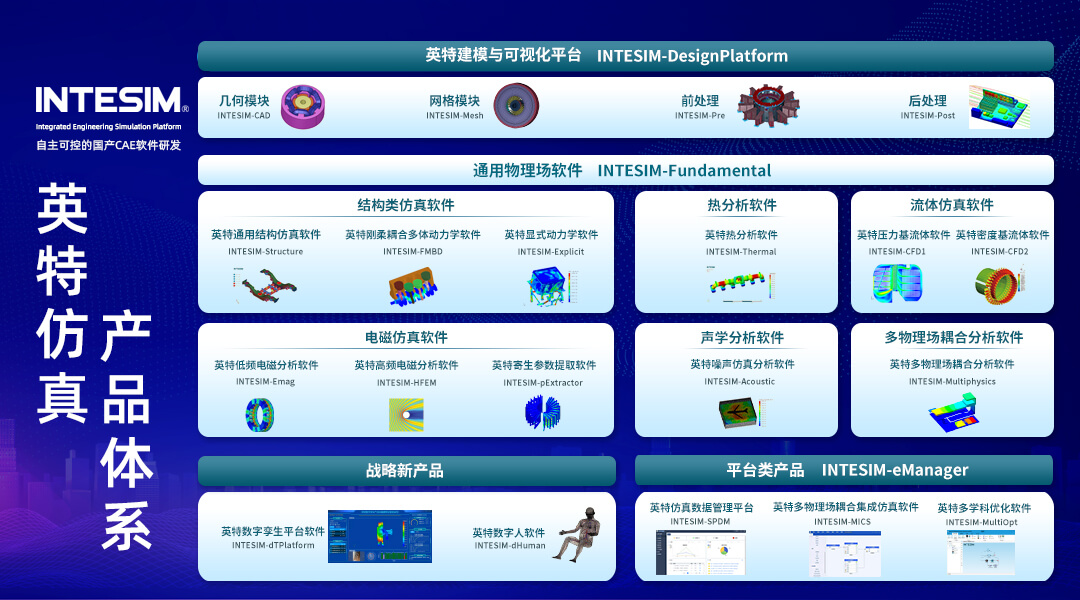
英特刚柔耦合多体动力学软件INTESIM-FMBD是针对工程问题中大量存在的刚柔耦合多体系统,围绕其复杂动力学行为而推出的产品。软件可对由刚体和柔体组成的多体系统进行运动学、动力学、静力学、频域振动分析、优化分析及特征值分析,求解器采用向后差分格式对多体动力学模型生成的微分代数方程组进行动力学积分,完成上万甚至百万广义坐标的求解。软件支持几何精确法/ 浮动坐标法/ 任意拉格朗日欧拉方法描述的单元类型,具备丰富的约束和连接库、驱动和力库,具备完善的刚柔接触分析能力。产品支持基于子系统的装配,在大变形柔性体描述、索驱机构模拟及移动接触问题求解方面具备一定优势。产品已成功应用于航空、航天、汽车、轨道交通、机械、电子、能源装备、机器人和智能装备等领域。

产品特色
完备的前后处理平台,从用户需求出发的多体动力学建模及后处理能力
完整支持刚体、模态柔性体、与各类大变形柔性体的统一建模与仿真求解
完善的分析类型,支持运动学动力学、静力学、频域振动分析、优化分析及特征值分析
刚体建模
支持通用几何文件接口
支持点、线、面、基本几何体创建
内置材料库,支持材料属性快速赋予
支持布尔运算、特征操作、几何清理
柔性体建模
支持梁、索、壳、膜、实体单元
支持模态综合法MNF文件导入与MNF预载荷设置
外部网格导入与1D、2D、3D网格剖分
约束
固定副、转动副、移动副、圆柱副、球副、虎克副、万向节、螺旋副、平面副、关联副
点面副、直线副、平行约束、垂直约束、方向约束、向心约束
点线高副、线线高副、多点约束、缆索滑轮约束、MPC、节点约束
驱动
平动驱动和转动驱动
作用在两个标记点之间的驱动
变长度机构运动速度驱动
高副驱动
载荷
一般作用力、力矩,支持函数表达式
非线性弹簧、扭簧
支持运动副摩擦力
接触
支持刚体、MNF柔性体、混合单元大变形柔性体接触分析
支持间隙检测功能
库功能
支持调用与管理的内置模型库
支持调参与优化的一维组件库
支持全流程自动化的模板库
求解
运动学、动力学、静力学、准静力学与频域振动分析、优化分析、特征值分析、联合仿真分析
支持基于 OpenMP 的并行求解
可视化与后处理
模型响应过程动画展示及导出
应力、应变、位移及速度云图显示
自定义视角播放
自动报告生成


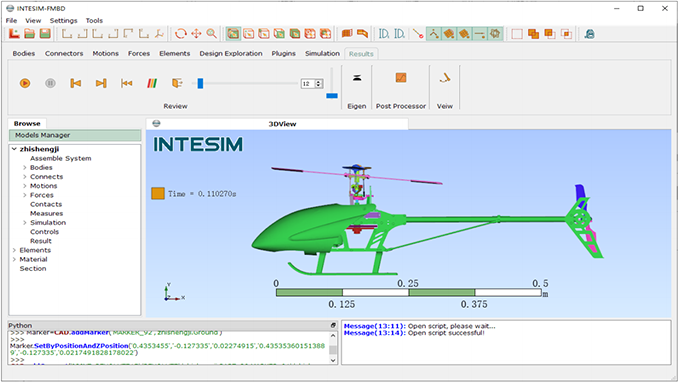
索膜单元的绳伞降落分析 超弹本构实体单元的螺旋弹簧分析

刚体与膜单元接触分析 刚体与梁、壳、实体单元接触分析